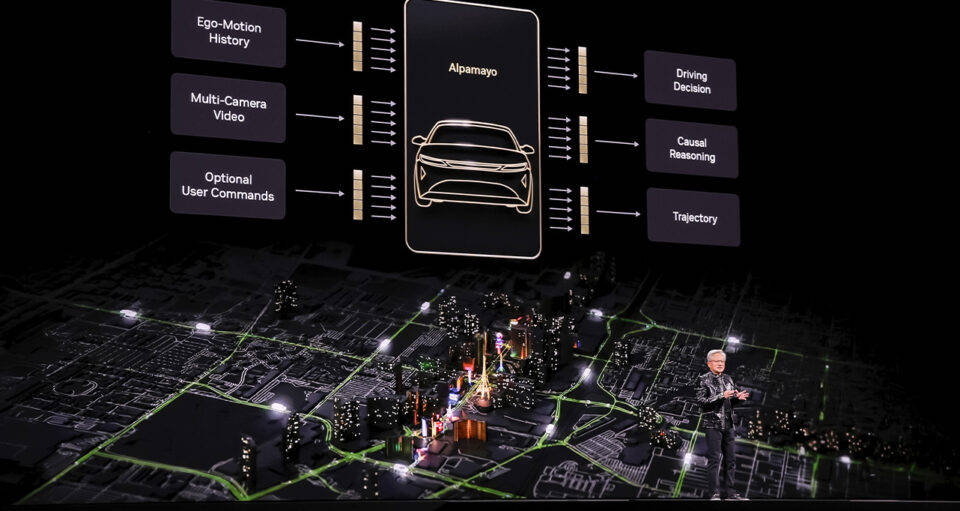
在自動(dòng)駕駛技術(shù)領(lǐng)域,英偉達(dá)再次取得重大突破,其全新發(fā)布的Alpamayo R1端到端訓(xùn)練模型引發(fā)行業(yè)廣泛關(guān)注。該模型以攝像頭輸入為起點(diǎn),直接輸出執(zhí)行指令,其訓(xùn)練數(shù)據(jù)不僅涵蓋海量真實(shí)自動(dòng)駕駛里程,還整合了人類駕駛示范數(shù)據(jù)。為增強(qiáng)模型泛化能力,英偉達(dá)創(chuàng)新性地引入自主研發(fā)的世界模型Cosmos生成的合成數(shù)據(jù),并完成數(shù)十萬例標(biāo)注訓(xùn)練,使系統(tǒng)具備更強(qiáng)的環(huán)境適應(yīng)能力。
Alpamayo R1的核心優(yōu)勢在于其類人推理機(jī)制。該系統(tǒng)不僅能精準(zhǔn)控制方向盤、剎車和加速,更能對(duì)駕駛決策進(jìn)行透明化解釋,例如說明變道原因或預(yù)測軌跡偏差。這種"思考-執(zhí)行"雙模式設(shè)計(jì),有效解決了自動(dòng)駕駛領(lǐng)域長期存在的長尾場景處理難題,為復(fù)雜路況下的安全駕駛提供了新思路。
技術(shù)開源戰(zhàn)略成為本次發(fā)布的另一亮點(diǎn)。英偉達(dá)將Alpamayo核心代碼完整開放至Hugging Face平臺(tái),同步提供覆蓋全球1700余小時(shí)的駕駛數(shù)據(jù)集,涵蓋雨雪天氣、城鄉(xiāng)道路等多元場景。通過模型蒸餾技術(shù),中小團(tuán)隊(duì)可將參數(shù)規(guī)模壓縮90%,在保持性能的同時(shí)降低部署成本。配套開源的AlpaSim仿真框架已在GitHub上線,支持開發(fā)者構(gòu)建高保真虛擬測試環(huán)境,結(jié)合Cosmos生成的合成數(shù)據(jù),形成"真實(shí)+虛擬"的雙重訓(xùn)練體系。
在系統(tǒng)安全架構(gòu)方面,英偉達(dá)采用雙軌制設(shè)計(jì)。Alpamayo作為主系統(tǒng)處理復(fù)雜場景,底層自動(dòng)駕駛堆棧則作為安全護(hù)欄持續(xù)監(jiān)控。當(dāng)策略評(píng)估模塊判定風(fēng)險(xiǎn)超標(biāo)時(shí),系統(tǒng)將自動(dòng)切換至經(jīng)典控制架構(gòu)。這種鏡像式設(shè)計(jì)使全新奔馳CLA成為全球首款同時(shí)運(yùn)行兩套自動(dòng)駕駛系統(tǒng)的量產(chǎn)車型,該車型預(yù)計(jì)年底前在美國率先交付。
行業(yè)合作網(wǎng)絡(luò)正在快速擴(kuò)張。捷豹路虎、Lucid、Uber等企業(yè)已啟動(dòng)技術(shù)對(duì)接,博世則采用NVIDIA NeMo套件加速AI功能開發(fā)。實(shí)車測試計(jì)劃同步推進(jìn):首輛測試車將于第一季度亮相美國街頭,二季度擴(kuò)展至歐洲市場,三四季度陸續(xù)進(jìn)入亞洲主要國家。英偉達(dá)汽車部門副總裁Ali Kani強(qiáng)調(diào),合成數(shù)據(jù)與真實(shí)數(shù)據(jù)的融合訓(xùn)練,將顯著提升系統(tǒng)在極端天氣和罕見路況下的可靠性。
本屆CES展會(huì)上,英偉達(dá)同步推出五大AI開發(fā)平臺(tái):智能體AI的Nemotron系列、物理AI的Cosmos平臺(tái)、機(jī)器人訓(xùn)練的Isaac GR00T以及生物醫(yī)學(xué)領(lǐng)域的Clara工具集。這些開源解決方案構(gòu)成完整的現(xiàn)實(shí)世界AI開發(fā)矩陣,從自動(dòng)駕駛到工業(yè)機(jī)器人,從數(shù)字孿生到藥物研發(fā),為不同行業(yè)提供定制化技術(shù)支撐。隨著Alpamayo生態(tài)的完善,自動(dòng)駕駛技術(shù)的普及進(jìn)程或?qū)⑦M(jìn)入快車道。