智能駕駛技術(shù)正經(jīng)歷一場(chǎng)由語言模型驅(qū)動(dòng)的深刻變革。從早期基于規(guī)則的模塊化設(shè)計(jì),到端到端學(xué)習(xí)架構(gòu)的突破,再到如今融合視覺、語言與行為模型的VLA技術(shù),自動(dòng)駕駛系統(tǒng)正從“機(jī)械執(zhí)行”向“認(rèn)知理解”跨越。這場(chǎng)技術(shù)躍遷的核心,在于語言模型為機(jī)器賦予了類似人類的推理能力,讓車輛不僅能“看見”路況,更能“理解”環(huán)境背后的邏輯。

傳統(tǒng)自動(dòng)駕駛系統(tǒng)采用模塊化設(shè)計(jì),將感知、預(yù)測(cè)、規(guī)劃、控制四大任務(wù)拆解為獨(dú)立模塊。這種架構(gòu)雖邏輯清晰,卻存在致命缺陷:模塊間數(shù)據(jù)傳輸誤差會(huì)逐級(jí)放大,例如感知模塊識(shí)別車道偏移10厘米,經(jīng)多層傳遞后可能演變?yōu)?0厘米的行駛偏差;為適配接口標(biāo)準(zhǔn),傳感器原始數(shù)據(jù)被大量壓縮,導(dǎo)致關(guān)鍵信息丟失。更嚴(yán)峻的是,現(xiàn)實(shí)路況的復(fù)雜性遠(yuǎn)超工程師的規(guī)則編寫能力,模塊化系統(tǒng)在極端場(chǎng)景下常因“無規(guī)則可依”而失效。
2016年,英偉達(dá)在《End-to-End Learning for Self-Driving Cars》論文中首次提出端到端學(xué)習(xí)框架,通過單一卷積神經(jīng)網(wǎng)絡(luò)直接將攝像頭圖像映射為方向盤轉(zhuǎn)角,開創(chuàng)了無需模塊拆分的智駕新范式。此后,多家車企驗(yàn)證了該技術(shù)能有效減少誤差累積與信息損失,但新問題隨之浮現(xiàn):端到端系統(tǒng)的性能完全依賴數(shù)據(jù)覆蓋率,而現(xiàn)實(shí)路況的組合可能性近乎無限,行業(yè)挑戰(zhàn)從“窮舉規(guī)則”升級(jí)為“窮舉場(chǎng)景”。
語言模型的引入,為突破這一瓶頸提供了關(guān)鍵思路。語言作為人類認(rèn)知的載體,具有三大獨(dú)特優(yōu)勢(shì):抽象性使其能用“蘋果”概括所有同類果實(shí),避免對(duì)每個(gè)場(chǎng)景單獨(dú)編碼;自回歸性天然契合駕駛場(chǎng)景的時(shí)序動(dòng)態(tài)規(guī)劃需求;知識(shí)承載性則讓互聯(lián)網(wǎng)文本構(gòu)成的世界知識(shí)庫成為車輛理解環(huán)境規(guī)則的基礎(chǔ)。這些特性使語言模型成為賦予機(jī)器認(rèn)知能力的理想通道。
VLA(視覺-語言-行為模型)技術(shù)正是這一理念的實(shí)踐。它并非簡(jiǎn)單堆砌視覺、語言、行為模塊,而是構(gòu)建統(tǒng)一工作空間,將多模態(tài)信息轉(zhuǎn)化為通用詞源由核心系統(tǒng)協(xié)同處理。其運(yùn)作流程分為三階段:首先,多視角攝像頭與激光雷達(dá)采集的原始數(shù)據(jù)經(jīng)視覺變換器(ViT)分割為“補(bǔ)丁”,展平為向量并添加位置編碼,形成帶空間信息的“視覺詞元”;隨后,大語言模型接收包含用戶指令文本、傳感器視覺與車況狀態(tài)的統(tǒng)一詞源序列,建立環(huán)境整體認(rèn)知;最后,行為解碼器將模型輸出的高層語義序列轉(zhuǎn)化為物理控制指令。
與傳統(tǒng)系統(tǒng)相比,VLA技術(shù)帶來兩大突破性升級(jí)。其一,可解釋性顯著增強(qiáng):通過“思維鏈”機(jī)制,系統(tǒng)能像人類一樣“大聲思考”,例如在變道前告知用戶“右側(cè)車道空閑,將提前并入”,解決了端到端模型的“黑箱”問題;其二,訓(xùn)練效率指數(shù)級(jí)提升:借助世界模型進(jìn)行虛擬迭代,系統(tǒng)性能不再完全依賴現(xiàn)實(shí)路采里程,而是通過海量模擬場(chǎng)景快速優(yōu)化。某車企實(shí)測(cè)數(shù)據(jù)顯示,VLA系統(tǒng)在復(fù)雜路口的決策準(zhǔn)確率較端到端模型提升37%,用戶信任度提高52%。
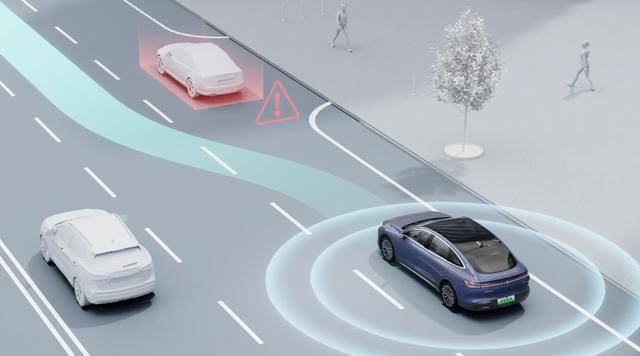
這種認(rèn)知能力的提升直接轉(zhuǎn)化為駕駛體驗(yàn)的質(zhì)變。傳統(tǒng)智駕系統(tǒng)像做“填空題”,僅能機(jī)械響應(yīng)“看到行人-停車”“看到前車-減速”等簡(jiǎn)單指令,常因行人猶豫或貨車變道等突發(fā)情況急剎;而VLA系統(tǒng)更似“真人司機(jī)”,能通過行人肢體語言預(yù)判其過馬路意圖,或根據(jù)貨車轉(zhuǎn)向燈提前調(diào)整車速避讓。某測(cè)試視頻顯示,面對(duì)路邊停靠車輛突然開門的情況,VLA系統(tǒng)不僅減速避讓,還主動(dòng)調(diào)整車道保持安全距離,展現(xiàn)出超越人類駕駛員的預(yù)判能力。
從模塊化到端到端,再到語言模型驅(qū)動(dòng)的認(rèn)知智能,智能駕駛的技術(shù)演進(jìn)路徑日益清晰。語言模型的融入,不僅重構(gòu)了車輛與環(huán)境的交互方式,更重新定義了人與車的信任關(guān)系——當(dāng)機(jī)器開始用人類邏輯理解世界,智能駕駛的體驗(yàn)革新才真正觸及本質(zhì)。